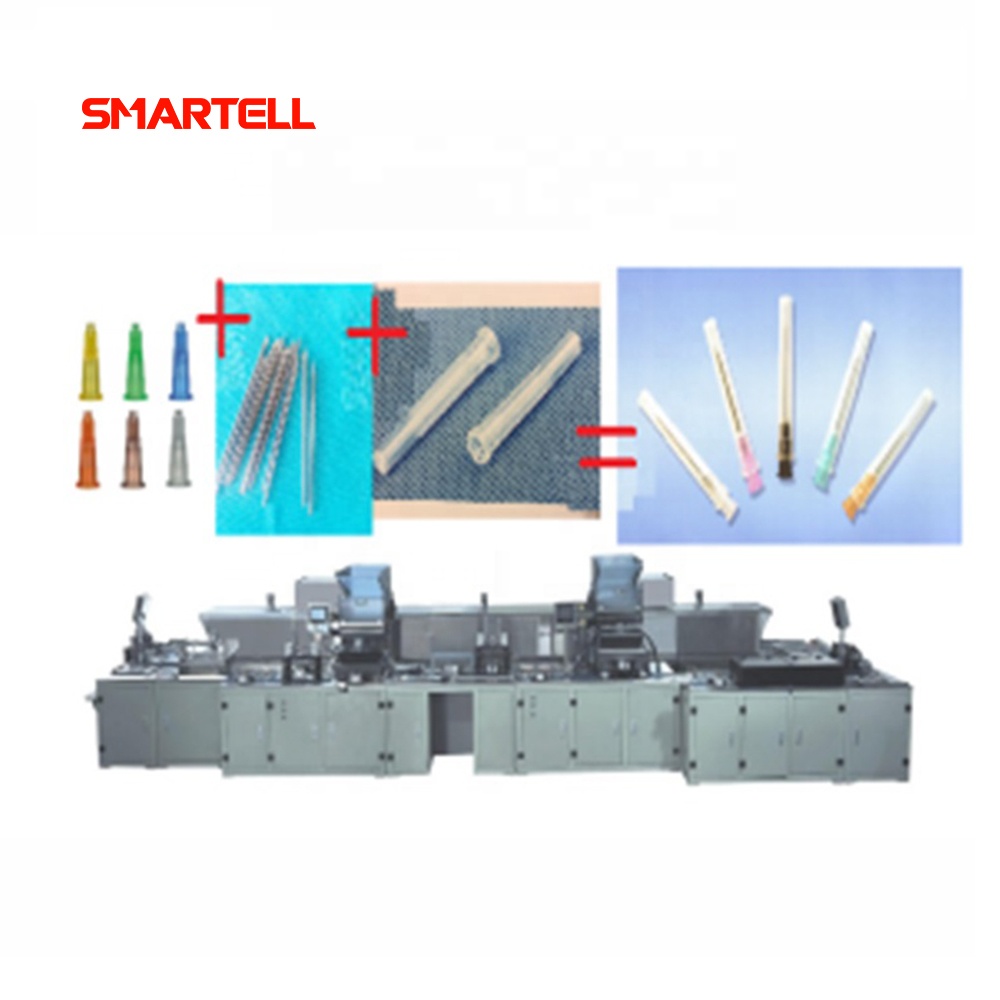
Fully Automatic Hypodermic Needle Assembly Machine
Brief Introduction
This machine is used to assemble and adhere hub, cannula, and cap of disposable needle, including coating oil on the cannula. The device adopts the Keyence programming control system, and the panel is easy to operate with the touch screen. The servomotor coating mechanism is smooth and uniform. The detection system adopts the Keyence CCD image system from Japan, with high speed at 45 pcs in one second for detecting unqualified needle, and the pneumatic configuration adopts imported components. It is full automatic which can greatly reduce the labor intensity of operators.
Working Principle
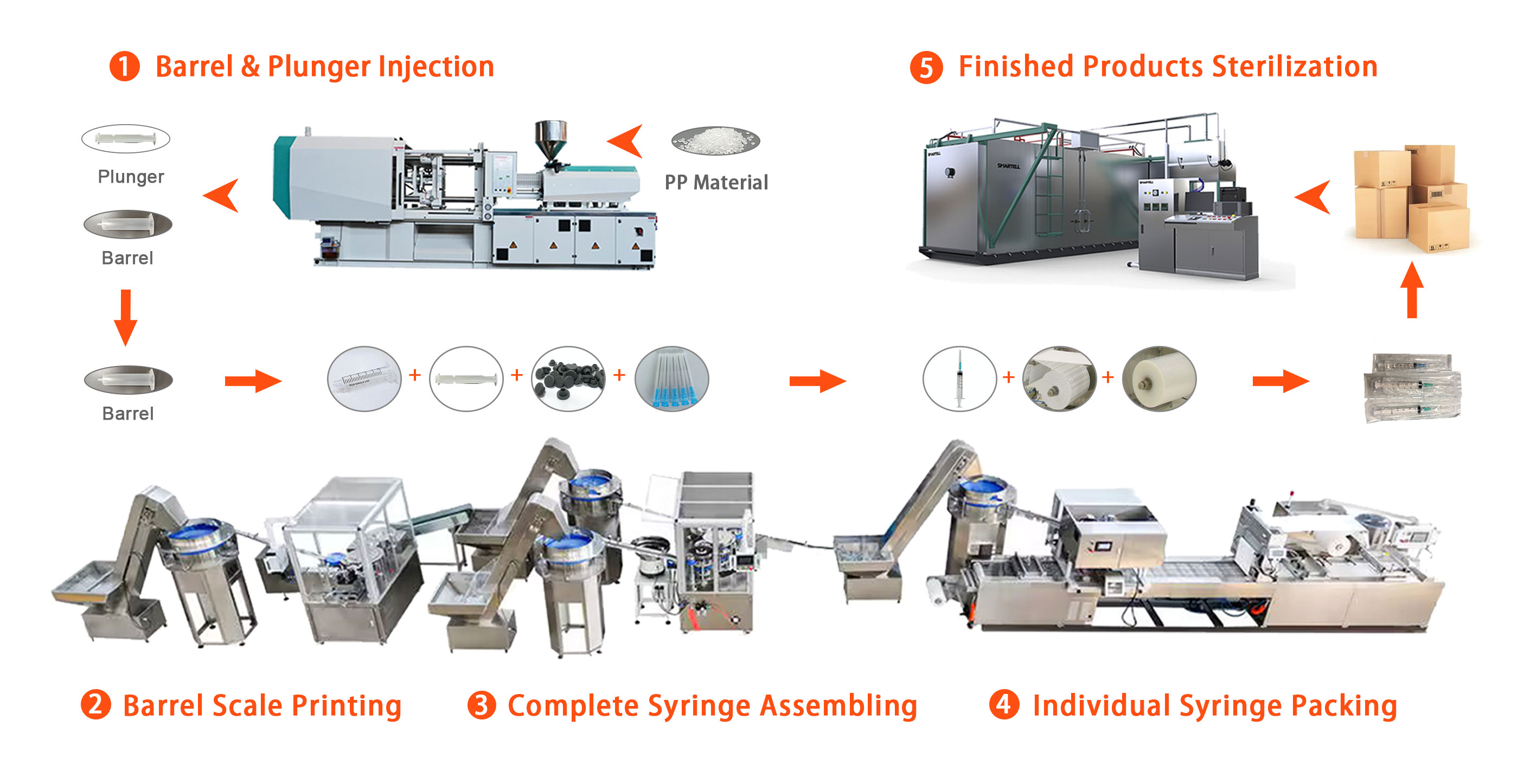
This machine is composed of the Hub-installing Position, Cannula-installing Position, Glue-pasting Position, Solidification in Oven, Coating silicone oil Position, Protective cap-installing position, protective cap-pressing and unload feeder position.
1. The Hub-installing Position: it need one operator to place the following jig to the appointed place, and then 50 pieces of hub will be separated from the hopper automatically by this device, and pour it into the following jig exactly.
2. Cannula-installing Position: it need one operator to place the following jig to the appointed place, and then 50 pieces of cannula will be separated from the hopper automatically by this device, and pour it into the hubs respectively.
3. Glue-pasting Position: this device is automatic. When this device induce that following jig coming, it will automatically lead the following jig into working position, and brush the resin glue on the joint place between hub and cannula. Then automatically send the following jig to the entrance of oven. Absorb servo motor to be round movement. It gets over the bad glue-pasting state which is arising by the changeable air pressure of cylinder.
4. Solidification in Oven: this device is automatic. after the following jig which has been brushed resin glue getting into oven, it make resin glue be slenderized on the condition that is after half an hour and under 120℃.
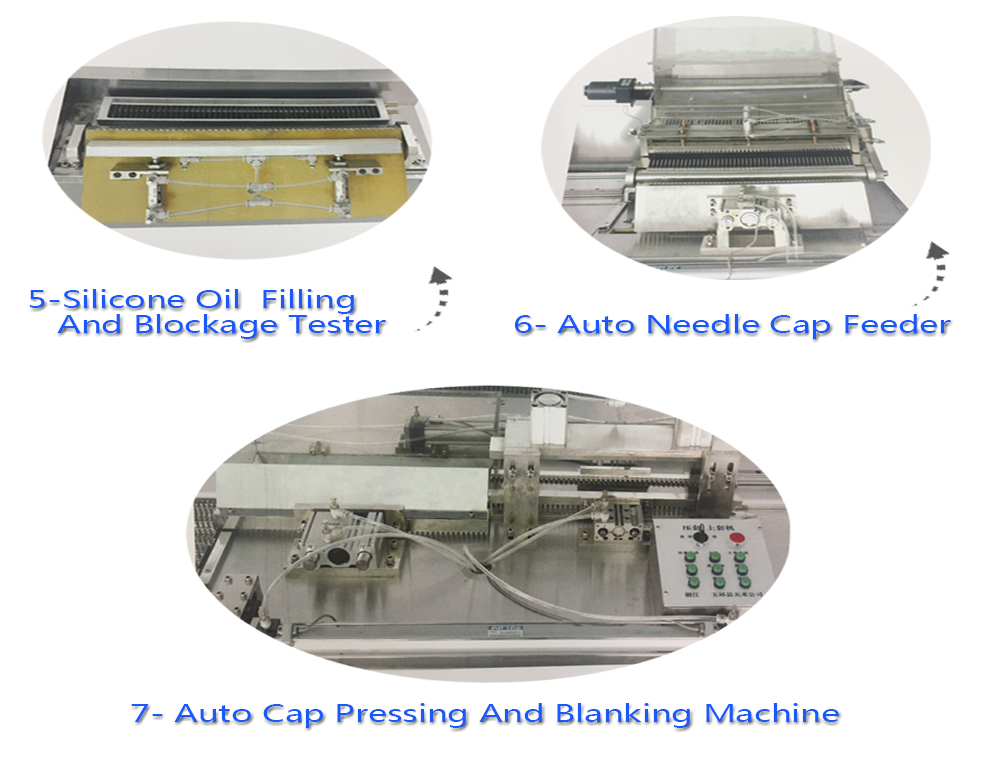
5. Coating silicone oil Position: this device need one operator. It place the following jig which slide out from oven onto the appointed place of splint, and turn over splint. Then coat silicone oil on the half of each cannula. And test whether the needle is jammed by resin glue by observing air bladder of silicone oil slot.
6. Protective cap-installing position: this device needs one operator. It will put following jig with silicone oil into appointed place. It will separate out 50 pieces of protective cap from hopper. And cover onto hub. That guarantee it will not hurt needle in the process of protective cap-installing.
7. Protective cap-pressing and unload feeder position. This device is automatic. When this device test that following jig with installed protective cap is running to the appointed position, it will press each protective cap automatically, and automatically unload the final needle from the following jig, meanwhile collecting it into cycling tank.